








Astrology
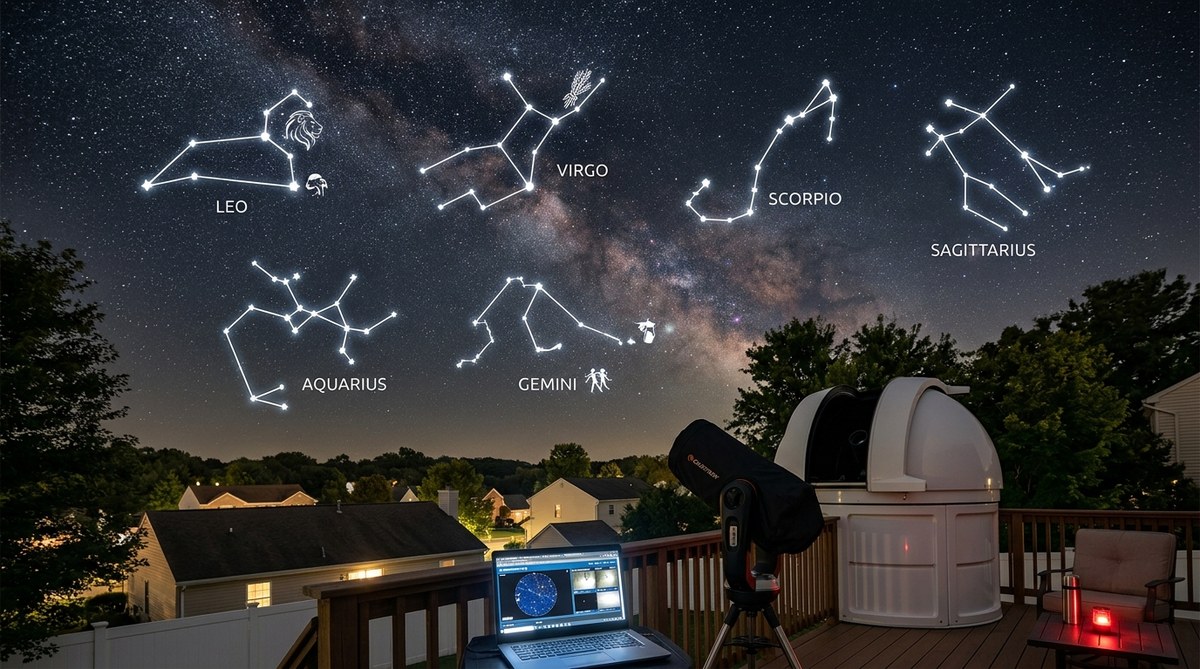
6 Zodiac Constellations You Can See from a Suburban Backyard Observatory
You do not need a dark sky preserve to see the zodiac. You do not…

Observations
7 Rare Astronomical Events Our All-Sky Camera Caught This Year That Astrologers Should Know About
The sky does not repeat itself. Not exactly. Every year brings a different rhythm of…
Observations
What the 2026 Venus-Jupiter Conjunction Reveals About Your Relationships
The night sky in 2026 has a gift for us. Two of the brightest planets,…

DIY Projects
How to Build a Remote Power Controller for Your Observatory from Scratch
You spend hours dialing in your polar alignment. You carefully focus your camera. You wait…

Software & Automation
How to Automate Your Observatory’s Image Processing Pipeline Using Free Software
For the first few years of running my backyard observatory, image processing felt like a…

Equipment & Setup
Essential Lightning Protection for Remote Observatory Equipment
You spent months carefully aligning your telescope, dialing in the autoguider, and running cables to…

Astrology
How Your All-Sky Camera Can Reveal the Astrological Weather of 2026
Your all-sky camera is more than a weather monitor. It is a window into the…

Observations
How Our Observatory Captured the 2026 Total Lunar Eclipse and What It Means for Your Zodiac
The 2026 total lunar eclipse has arrived, and it’s one for the history books. If…

Software & Automation
Is Your Remote Observatory Ready for Fully Automated Run Mode?
Your observatory sits out in the backyard, or maybe it is hours away at a…

Equipment & Setup
Essential Cable Management Tips for a Reliable Remote Observatory Setup
A single loose cable can turn a perfect imaging night into a frustrating remote rescue.…